
 Qui di Seguito Sono Presentati 3 Soluzioni, 2 Integrate e una Discreta, per Pilotare con Elevate Correnti i Motori Passo Passo o DC…
Qui di Seguito Sono Presentati 3 Soluzioni, 2 Integrate e una Discreta, per Pilotare con Elevate Correnti i Motori Passo Passo o DC…
INTRO
I motori molte volte vengono controllati da microcontrollori, solo che questi non sono in grado di fornire in uscita correnti elevate, servono quindi circuiti per fornire correnti elevate ma mantenere il pieno controllo dei motori. Molti di essi sono semplici buffer, ricevono un ingresso logico e forniscono in uscita elevate correnti quando l’ingresso e a livello logico alto, altri invece permettono di controllare la corrente assorbita e la loro stessa temperatura. Qui di seguito sono presentati 3 soluzioni, 2 integrate e una discreta, per controllare i motori passo passo o DC. Ovviamente vi sono molte altre soluzioni.
ADP3654
È un semplice integrato che svolge la funzione di buffer, con finale formato da un N-Mosfet e un P-Mosfet, inoltre in un singolo package ve ne sono disponibili 2. Nelle caratteristiche salienti è riportata la loro velocità, ovvero 10ns, e la capacità di supportare correnti da 4A. Lo schema a blocchi interno è il seguente:
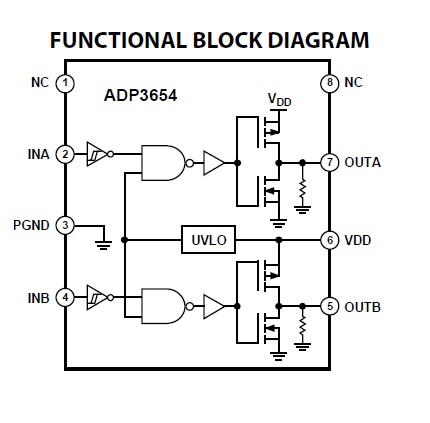 La tensione di alimentazione va da 4.5V a 18V, e le uscite possono supportare picchi di corrente di 4A, mentre, gli ingressi riconoscono 2V come livello logico alto mentre tensioni minori di 0.8V come tensioni basse. Le uscite possono essere inoltre connesse insieme se connessi insieme anche gli ingressi, in modo tale da supportare più corrente.
La tensione di alimentazione va da 4.5V a 18V, e le uscite possono supportare picchi di corrente di 4A, mentre, gli ingressi riconoscono 2V come livello logico alto mentre tensioni minori di 0.8V come tensioni basse. Le uscite possono essere inoltre connesse insieme se connessi insieme anche gli ingressi, in modo tale da supportare più corrente.
Il circuito può essere usato per alimentare motori, realizzare amplificatori in classe D, inverter e anche raddrizzatori sincroni. Il circuito interno UVLO riconosce un livello basso della tensione di alimentazione, dovuto all’accensione iniziale o ad un corto circuito, in modo tale da disabilitare le uscite. I pin sono semplici da intuire, vi sono due pin di alimentazione, uno per l’ingresso del canale A con la relativa uscita del canale A e poi vi è l’ingresso e l’uscita del canale B. Purtroppo la corrente nei Mosfet può scorrere solo in un verso, servono quindi dei diodi di protezione se si vanno ad alimentare carichi induttivi. Lo schema per il driving di motori DC e motori passo passo è quindi il seguente:
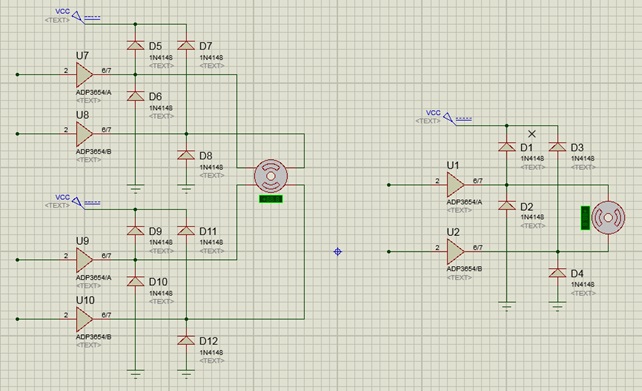 Per il controllo di un motore passo passo servono 4 driver, quindi due integrati, per i segnali di controllo, si può leggere un articolo precedente. Per il controllo di motori DC invece basta un solo integrato, ovvero 2 driver. Se il segnale A=1 e il segnale B=0 gira in un verso, se invece A=0 e B=1 gira in verso opposto, mentre se invece si avere uno dei due ingressi a livello logico alto, si ha un segnale PWM, il motore avrà una velocità controllata dal segnale PWM, se esso ha un duty cycle del 100% si avrà la velocità massima, che decresce al decrescere della percentuale, fino a che non si ferma quando il duty cycle è allo 0% ovvero il segnale è sempre a livello basso. I diodi servono per evitare che la corrente si annulli, sono detti diodi di ricircolo e permettono un flusso continuo di corrente, in modo tale che non vi siano sovratensioni pericolose che potrebbero danneggiare i driver. Si usano solo con carici induttivi come motori o altoparlanti.
Per il controllo di un motore passo passo servono 4 driver, quindi due integrati, per i segnali di controllo, si può leggere un articolo precedente. Per il controllo di motori DC invece basta un solo integrato, ovvero 2 driver. Se il segnale A=1 e il segnale B=0 gira in un verso, se invece A=0 e B=1 gira in verso opposto, mentre se invece si avere uno dei due ingressi a livello logico alto, si ha un segnale PWM, il motore avrà una velocità controllata dal segnale PWM, se esso ha un duty cycle del 100% si avrà la velocità massima, che decresce al decrescere della percentuale, fino a che non si ferma quando il duty cycle è allo 0% ovvero il segnale è sempre a livello basso. I diodi servono per evitare che la corrente si annulli, sono detti diodi di ricircolo e permettono un flusso continuo di corrente, in modo tale che non vi siano sovratensioni pericolose che potrebbero danneggiare i driver. Si usano solo con carici induttivi come motori o altoparlanti.
DRIVER A MOSFET
Un driver per motori può essere realizzato a Mosfet o a transistor. I transistor però richiedono potenza statica di controllo, inoltre sono più lenti e generano una caduta di tensione quando sono accesi maggiore rispetto i Mosfet. Si usano quindi i Mosfet. Lo schema di un driver a Mosfet è il seguente:
 Per controllare un motore DC servono 4 Mosfet e due porte logiche, per un motore passo passo gli elementi raddoppiano. Se si usano Mosfet di potenza il diodo di ricircolo è già integrato in esso. La porta logici utilizzata è una delle 6 presenti nell’integrato BU4584. Essa è necessaria perché fornendo in ingresso ai gate dei due Mosfet un livello logico alto, l’uscita, ovvero i due drain, si portano a livello logico basso, quindi realizzano una funzione invertente, che viene annullata grazie alla porta logica invertente. La porta logica ha una tensione massima di 16V, mentre i Mosfet supportano tensioni più alte, ma nel complesso la tensione non può essere superiore ai 15V. per quanto riguarda la corrente massima questa dipende dai Mosfet, e per i Mosfet utilizzati si ha una corrente massima di 90A. Se si vogliono tensioni maggiori bisogna alimentare la porta logica sempre a 15V, quindi usare un regolatore lineare per ottenere 15V, oppure si usa un’altra porta logica. Ovviamente in questa soluzione non vi è nessun tipo di protezione, ma la si potrebbe inserire complicando lo schema. La seguente soluzione permette di avere correnti maggiori.
Per controllare un motore DC servono 4 Mosfet e due porte logiche, per un motore passo passo gli elementi raddoppiano. Se si usano Mosfet di potenza il diodo di ricircolo è già integrato in esso. La porta logici utilizzata è una delle 6 presenti nell’integrato BU4584. Essa è necessaria perché fornendo in ingresso ai gate dei due Mosfet un livello logico alto, l’uscita, ovvero i due drain, si portano a livello logico basso, quindi realizzano una funzione invertente, che viene annullata grazie alla porta logica invertente. La porta logica ha una tensione massima di 16V, mentre i Mosfet supportano tensioni più alte, ma nel complesso la tensione non può essere superiore ai 15V. per quanto riguarda la corrente massima questa dipende dai Mosfet, e per i Mosfet utilizzati si ha una corrente massima di 90A. Se si vogliono tensioni maggiori bisogna alimentare la porta logica sempre a 15V, quindi usare un regolatore lineare per ottenere 15V, oppure si usa un’altra porta logica. Ovviamente in questa soluzione non vi è nessun tipo di protezione, ma la si potrebbe inserire complicando lo schema. La seguente soluzione permette di avere correnti maggiori.
LMD18200
Il seguente integrato serve per pilotare motori DC, però, utilizzandone due insieme, si possono pilotare anche motori passo passo. Garantisce una corrente continua di 3A, con picchi di 6° e una tensione di alimentazione da 12V fino a 55V, mentre permette di avere ingressi di controllo con tensione di 5V. Dispone inoltre delle protezioni dai cortocircuiti, della protezione termica e dei diodi di ricircolo. Permette la misura della corrente grazie ad un apposito pin e permette di avere un flag sulla temperatura del chip. Se la temperatura del silicio raggiunge i 145°C il pin 9 si porta a livello logico basso, a massa. Lo schema a blocchi è:
 Ai pin Bootstrap si connettono dei condensatori con un terminale al pin bootstrap e l’altro all’uscita. Il pin “DIRECTION” inverte la tensione tra ”OUTPUT1” e ”OUTPUT2”. Il pin “BRAKE” azzera la tensione tra le uscite, cortocircuitandole, mentre il contatto “PWM” fornisce un segnale PWM in uscita. Se non si vuole usare il PWM si mette questo pin a livello alto mentre se si vuole annullare il pin “BRAKE” lo si deve connettere a massa. Lo schema di utilizzo è il seguente:
Ai pin Bootstrap si connettono dei condensatori con un terminale al pin bootstrap e l’altro all’uscita. Il pin “DIRECTION” inverte la tensione tra ”OUTPUT1” e ”OUTPUT2”. Il pin “BRAKE” azzera la tensione tra le uscite, cortocircuitandole, mentre il contatto “PWM” fornisce un segnale PWM in uscita. Se non si vuole usare il PWM si mette questo pin a livello alto mentre se si vuole annullare il pin “BRAKE” lo si deve connettere a massa. Lo schema di utilizzo è il seguente:
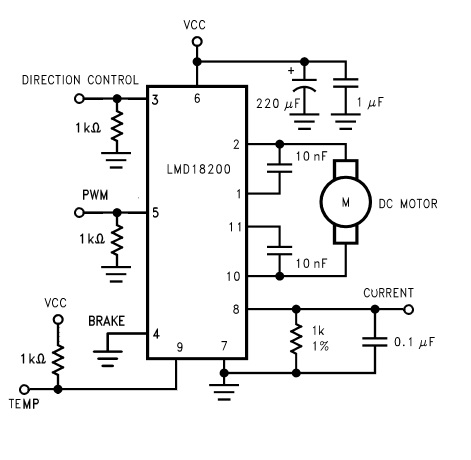 Con questo schema si va a disabilitare il pin “BRAKE”, se invece si utilizza come ingresso è necessaria una resistenza di pull-up o pull-down per evitare che il pin sia floating. Ai pin “PWM” e “DIRECTION” vi è una resistenza di pull-down per evitare che il pin rimanga floating. Con un microcontrollore poi si modifica lo stato logico di questi ingressi. Il pin 9 da un flag di alta temperatura, se la temperatura è maggiore di 145°C allora lo stato è basso, altrimenti viene tenuto alto dalla resistenza di pull-up, che può essere connessa ad una tensione di 5V o all’alimentazione. Il pin 6 è l’alimentazione positiva, il 7 la massa, è consigliabile inserire dei condensatori elettrolitici tra questi pin. I pin 2 e 10 sono le uscite mentre i pin 1 e 11 i pin di “BOOTSTRAP” utili ad ottenere tensioni maggiori di VCC da fornire ai gate degli N-Mos usati come rete di pull-up del ponte ad h, per non avere elevate cadute sul Mosfet. Infine il pin 8 è il pin per il sensing di corrente, in particolare questo pin eroga 377uA per ogni Amperre assorbito dal motore, quindi inserendo una resistenza da 1KΩ si ottiene una tensione di 0.377V per ogni Amperre assorbito dal motore. Questo dato può essere letto da un microcontrollore per attuare delle azioni se necessario.
Con questo schema si va a disabilitare il pin “BRAKE”, se invece si utilizza come ingresso è necessaria una resistenza di pull-up o pull-down per evitare che il pin sia floating. Ai pin “PWM” e “DIRECTION” vi è una resistenza di pull-down per evitare che il pin rimanga floating. Con un microcontrollore poi si modifica lo stato logico di questi ingressi. Il pin 9 da un flag di alta temperatura, se la temperatura è maggiore di 145°C allora lo stato è basso, altrimenti viene tenuto alto dalla resistenza di pull-up, che può essere connessa ad una tensione di 5V o all’alimentazione. Il pin 6 è l’alimentazione positiva, il 7 la massa, è consigliabile inserire dei condensatori elettrolitici tra questi pin. I pin 2 e 10 sono le uscite mentre i pin 1 e 11 i pin di “BOOTSTRAP” utili ad ottenere tensioni maggiori di VCC da fornire ai gate degli N-Mos usati come rete di pull-up del ponte ad h, per non avere elevate cadute sul Mosfet. Infine il pin 8 è il pin per il sensing di corrente, in particolare questo pin eroga 377uA per ogni Amperre assorbito dal motore, quindi inserendo una resistenza da 1KΩ si ottiene una tensione di 0.377V per ogni Amperre assorbito dal motore. Questo dato può essere letto da un microcontrollore per attuare delle azioni se necessario.
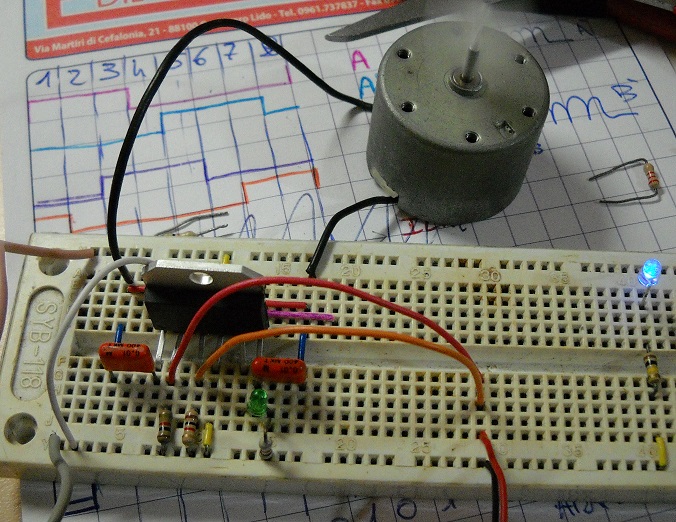
Lo schema montato su breadboard ha la seguente forma:
DATASHEET
