
 Tutorial per Illustrare il Funzionamento dei Misuratori di Flusso per Liquidi ad Effetto Hall Soffermandosi sulle Caratteristiche del Modulo YF-S201…
Tutorial per Illustrare il Funzionamento dei Misuratori di Flusso per Liquidi ad Effetto Hall Soffermandosi sulle Caratteristiche del Modulo YF-S201…
INTRO
I misuratori di flusso per liquidi ad effetto Hall sono in grado di misurare il flusso, ovvero la quantità in litri in un certo tempo, di liquidi come acqua, benzina, olio o simili. Non sono in grado di misurare il peso ma solo il volume anche se queste due grandezze in alcuni liquidi come l’acqua coincidono.
In particolare i misuratori di flusso ad effetto Hall utilizzano un girante, ovvero delle palette disposte lungo il raggio di un cerchio, per creare una rotazione con il flusso del liquidi, sul girante vi è un elemento magnetico e il sensore ad effetto Hall rileva la variazione del campo magnetico fornendo un segnale di tensione.
Ad esempio nell’immagine sovrastante vi è un magnete per ogni pala del girante, il sensore ad effetto Hall si trova in un punto ben preciso e rileva il passaggio di ogni pala. Il sensore ad effetto Hall all’interno è digitale, quindi fornisce un livello logico alto quando la pala è vicina ad esso, basso altrimenti.
Quindi in questo tipo di misuratore si vanno a misurare i giri del girante e in base ai giri vi sarà un fattore di conversione che dipende dalla geometria dello strumento.
FUNZIONAMENTO DEL SENSORE YF-S201
Il misuratore sotto esame ha il seguente aspetto:

Il misuratore di flusso YF-S201 ha una struttura leggermente diversa, ha un solo magnete in cima al rotore e questo magnete girando “mostra” al sensore Hall o il polo nord o il polo sud, quindi il sensore fornisce in uscita un segnale alto o basso in base al polo magnetico. Quindi in questo caso si contano perfettamente i giri del girante. La geometria interna ed esterna del modulo è la seguente:
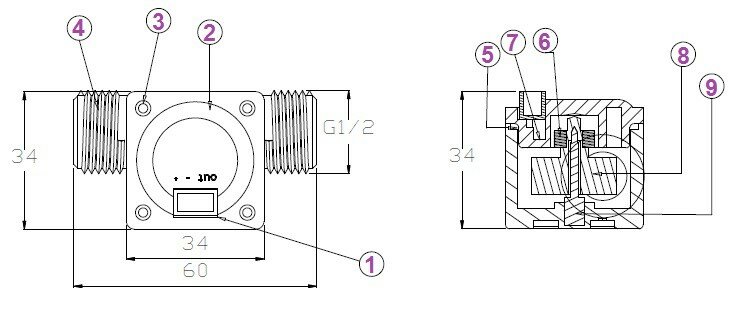
Gli attacchi per il flusso in ingresso e in uscita sono da ½ pollice e non vi è una direzione univoca di ingresso, quindi si possono collegare senza fare nessuna attenzione e inoltre si possono misurare sia il flusso entrante che uscente. I numeri indicano:
- Connessione dei cavi.
- Scatolo
- Giunto da ½ pollice.
- Valvola di perdita per elevata pressione.
- Sensore ad effetto Hall.
- Asse del girante.
I tre fili, rosso, nero e giallo, sono rispettivamente l’alimentazione positiva e negativa e il segnale di uscita ad onda quadra. Per il fatto che il modulo misura il flusso in ambedue le direzioni si potrebbero avere errori di misura (ad esempio vi è un risucchio di acqua o aria nel sistema), quindi si consiglia di utilizzare una valvola di ritegno.
CARATTERISTICHE ELETTRICHE E IDRAULICHE
Le caratteristiche elettriche del modulo e le due caratteristiche di misura sono le seguenti:
- Tensione di alimentazione da 5V fino ad un massimo di 18V
- Corrente assorbita 15mA con alimentazione a 5V
- Segnale di uscita a 5V con logica TTL
- Flusso minimo di 1 litro al minuto e flusso massimo di 30 litri al minuto
- Temperatura di funzionamento da -25°C a +80°C
- Accuratezza del ±10%
- Pressione massima dell’acqua di 20Mpa
- Rise time segnale di uscita 40ns, Fall time di 180ns
- Connessione tubi da ½ con diametro interno di ¾ di pollice
- Dimensioni (lunghezza, larghezza, altezza) di 6.4×3.5×3.5
La tensione di alimentazione va da 5V a 18V, se si esce dal range o il modulo non funziona o si brucia, si deve garantire una corrente di 15mA con 5V di alimentazione mentre varia di 2mA circa se maggiore. L’uscita non dipende dalla tensione di alimentazione e i livelli logici sono 0-5V. I flussi minori di 1 litro al minuto non vengono rilevati mentre quelli maggiori di 30 litri al minuto potrebbero danneggia il sensore o avere un elevato errore di misura. La temperatura di funzionamento arriva fino a -25°C anche se si sconsiglia di far ghiaccia l’acqua al suo interno.
L’errore del sensore è di circa il 10% in meno o in più, il che vuol dire che lui fornisce in uscita un segnale che indica ad esempio 10 litri al minuto ma in realtà possono essere 11 litri o 9 litri al minuto. Se si misura la quantità di liquido invece il sensore può aver misurato 1 litro invece possono essere 900ml o 1.1 litri. L’errore è abbastanza grande se si vogliono applicazioni di precisione, quindi converrebbe tarare il sensore su microcontrollore, anche se l’errore può variare nel tempo. Il segnale ad onda quadra in uscita ha un fronte di salita di 40ns mentre uno di discesa di 180ns.
Per quanto riguarda la caratteristica elettrica essa è la seguente:
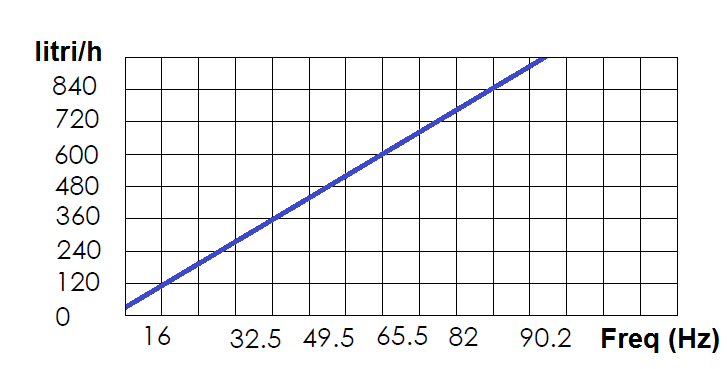
La caratteristica è lineare è indica che con un flusso di 120 litri l’ora (ovvero 2 litri al minuto) il modulo ha un segnale di uscita a 16Hz, 32.5Hz con 240 litri l’ora e 90.2Hz con 720 litri l’ora. In altre parole, l’equazione che lega la frequenza con il flusso è la seguente:
Flusso (litri al minuto) = Frequenza (Hz) / 7.5
Quindi misurando la frequenza e dividendo per la costante 7.5 posso ottenere il valore del flusso espresso in litri al minuto. L’altra soluzione elettrica per misurare il volume del liquido è quello di contare il numero di impulsi, ovvero contare i fronti di salita visto che 450 fronti di salita corrispondono ad un litro, quindi:
Volume liquido (litri) = Fronti di salita contati / 450
Quindi ad esempio se il microcontrollore conta 39000 fronti di salita vuol dire che sono passati attraverso il misuratore di flusso un volume di 86.6 litri. Considerando anche l’errore del 10% la quantità effettiva è compresa tra 77.94 e 95.26 litri. Per misure di quantità molto elevate si consiglia di fare una taratura software del modulo visto l’errore grande.
