
 Tutorial sul Sensore di Movimento PIR Modello HC-SR501, Illustrando Caratteristiche e Funzionamento…
Tutorial sul Sensore di Movimento PIR Modello HC-SR501, Illustrando Caratteristiche e Funzionamento…
INTRO
La sigla PIR sta per Passive Infra-Red, ovvero infra rosso passivo ed è un tipo di sensore che sfrutta un dispositivo piroelettrico che rileva il movimento misurando il cambiamento dei livelli di infrarossi emessi dagli oggetti che circondano il sensore. Il movimento viene rilevato da un sensore infrarosso passivo di tipo LHI778 che invia il segnale a un integrato di tipo BISS0001 che rileva se vi è movimento o no. Il seguente modulo invia una informazione di tipo bit in uscita, ovvero 0 logico no movimento mentre 1 logico movimento. Il modulo può essere usato per realizzare allarmi o automatismi per luci ed è molto diffuso vista la sua semplicità ed economicità.
DESCRIZIONE
Il modulo ha il seguente aspetto:
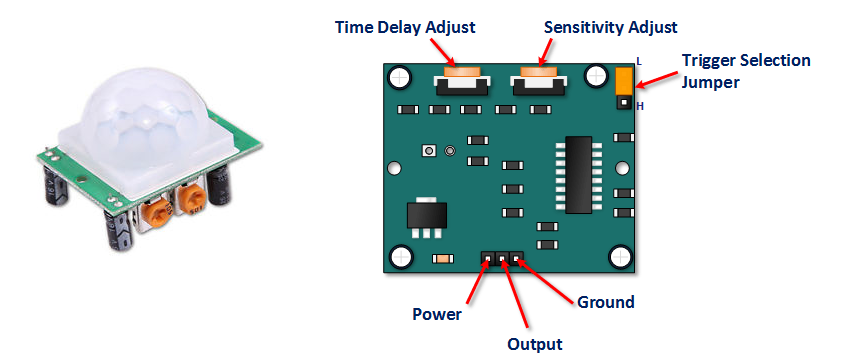
La parte anteriore è formata da una semisfera di plastica al cui centro vi è il sensore infrarosso, questa semisfera raccoglie verso il sensore infrarosso tutte le fonti infrarosse.
La parte posteriore è la parte del circuito, contiene il regolatore di tensione per l’alimentazione e l’integrato citato precedentemente, inoltre contiene i PIN di alimentazione e il PIN del segnale di output, inoltre vi sono i controlli della sensibilità e del delay del segnale alto, inoltre vi è un controllo del trigger.
Partiamo dai PIN; Power il il pin dell’alimentazione positiva, Output è il segnale, 0 se non vi è movimento, 1 se vi è o c’è stato movimento mentre Ground è la massa o alimentazione negativa.
Poi vi sono due trimmer, il primo controlla il delay, ovvero quanto rimane alto il segnale dopo il movimento, il minimo è 3 secondi, il massimo 5 minuti e in particolare girando in senso orario si raggiunge il massimo del tempo, in senso antiorario invece si raggiunge il minimo del delay.
Il secondo trimmer regola la sensibilità che va da un minimo di 3 metri ad un massimo di 7 metri. Regolare la sensibilità può servire per alcune applicazioni, ad esempio si deve accendere una luce solo se si è a 3 metri dal sensore e non 7. Se si gira il trimmer della sensibilità in senso orario si raggiunge la minima sensibilità, ovvero si decrementa la sensibilità mentre girando il trimmer in senso antiorario si aumenta la sensibilità., raggiungendo i 7 metri.
Infine si è un jumper con tre posizioni. Non in tutti i moduli di questo tipo vi è il jumper settabile, in alcuni la posizione è fissa ma si può modificare interrompendo una pista del circuito stampato e facendo una saldatura. Le posizioni sono solo due; se il pin centrale è connesso al pin L allora dopo il movimento il segnale diventa alto e rimane alto per un tempo che dipende dal trimmer del tempo, se vi è un nuovo movimento il tempo mentre il segnale è alto non viene resettato. Se il pin centrale è connesso al pin H (o tramite il jumper o con connessione pre settata) allora il pin di uscita del segnale rimane a livello alto dopo l’ultimo movimento per un tempo che dipende dal trimmer del tempo, indipendentemente se prima vi è stato un movimento o no.
CARATTERISTICHE
Le caratteristiche sono:
- Tensione alimentazione: 5V fino a 20V massimi
- Consumo di corrente: 65mA – 50uA in sleep
- Distanza massima rilevamento: 7m
- Livelli tensione uscita: 0V no movimento, 3.3V movimento, TTL
- Durata segnale: da 3 secondi a 5 minuti regolabili
- Temperatura funzionamento: -15°C/70°C
- Angolo di sensing 110°
Visto il regolatore di tensione interno a 3.3V la tensione minima tra il pin power e ground deve essere 5V fino ad un massimo di 20V e Il consumo dipende dal fatto se il pin di uscita è alto o basso. L’uscita è a 3.3V di tipo TTL, anche se si usa un microcontrollore a 5V, i 3.3V vengono visto come livello di tensione alto e il microcontrollore riconosce l’informazione di movimento.
L’angolo di sensing è 110° ovvero:

Quindi se il movimento è al di fuori del cono da 110° il movimento non viene rilevato o viene rilevato a fatica.
Il seguente modulo può essere connesso a un microcontrollore che controlla l’uscita del modulo con un interrupt ad esempio e fa scattare un attuatore se vi è movimento, oppure può anche essere connesso a un buzzer attivo interponendo un transistor in modo tale da avere un suono se vi è movimento.
